Motor Skru Bergerak Dan Motor Rel Gelongsor
Butiran
Pemprosesan disesuaikan:YA.
No item: FS-0000-M.
Model: Motor gelincir mendatar.
Jenis: motor mikro.
Model yang boleh digunakan: pelbagai model.
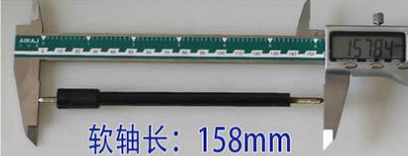
Saiz rupa: Φ40*160*200.
Asal: China.
Bahan: besi.
Naikkan jarak: 30CM.
| model | voltan(V) | tiada beban | disekat | bunyi bising | jenama | berat badan | |||
| Julat | garisan | kelajuan (rpm) | semasa(A) | tork | semasa(A) | ||||
| Motor gelincir mendatar | 9-13 | 13 | 185-230 | 2.5 | 4.95-7.5 | 25 | ≤42 | JIEYI | 496 g |
kenapa pilih kami
Pilih kami dan anda tidak akan menghadapi masalah ini lagi.Empat kelebihan, memberi anda perangai yang berbeza
- kaki kuasa: pemutar dawai tembaga tulen
- hingar rendah: bunyi rendah apabila mengangkat
- hayat panjang: hayat perkhidmatan yang panjang
- bahan yang baik: bahan berkualiti tinggi terpilih
Pelarasan
pelarasan lejang depan dan belakang
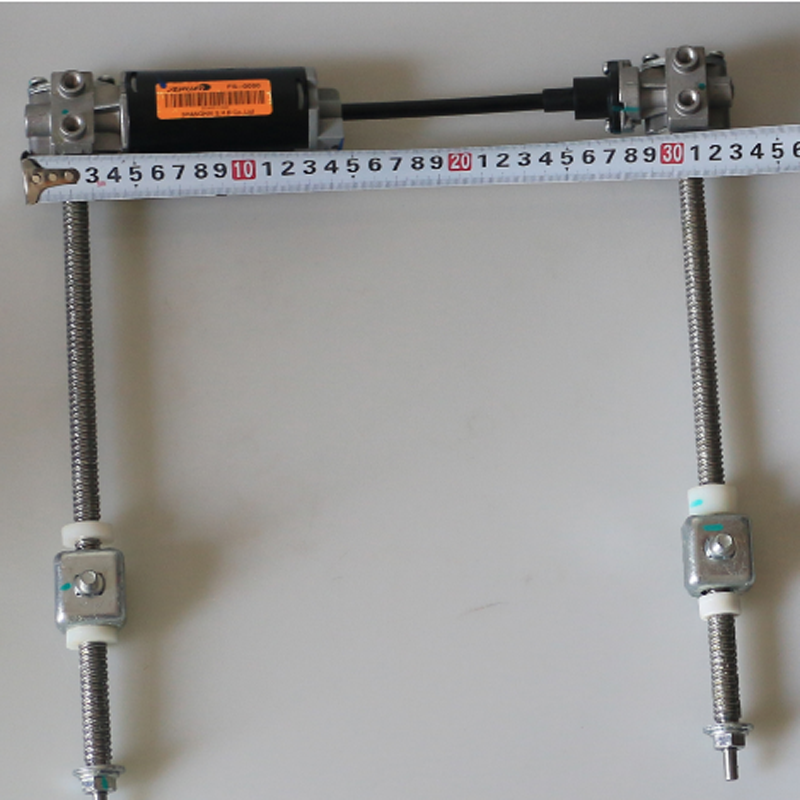
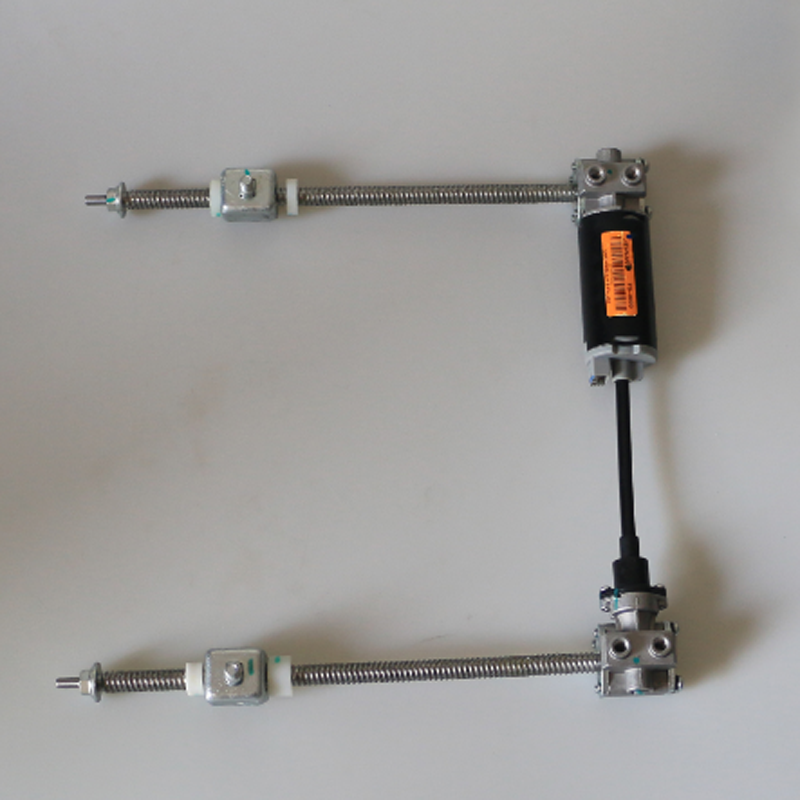
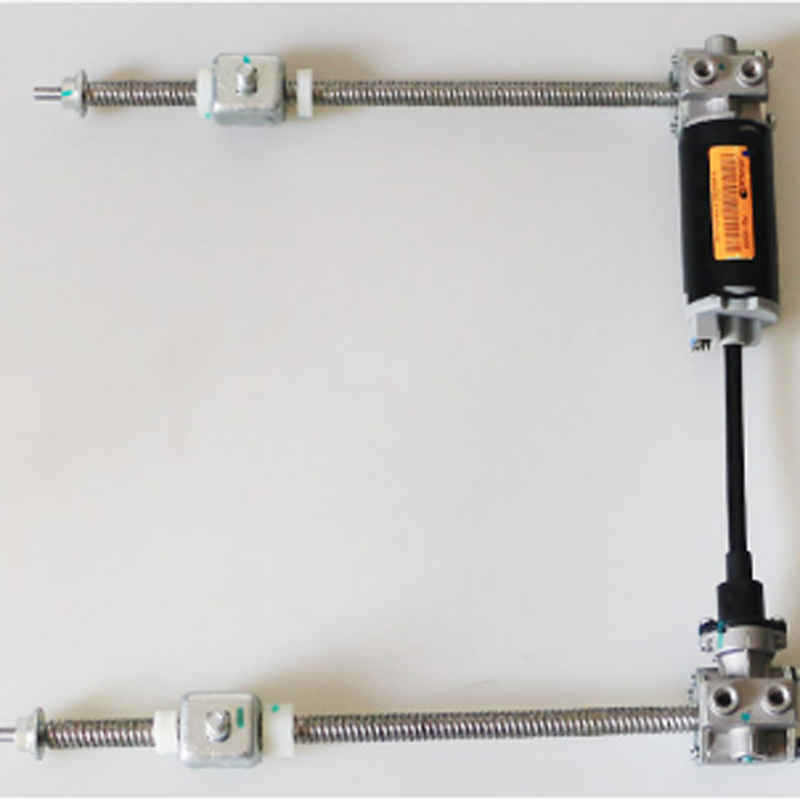
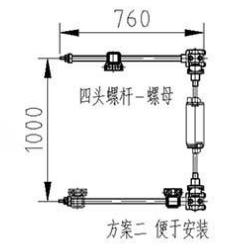
"Mekanisme skru gear cacing, skru dipasang pada rel gelongsor, roda cacing dipasang pada rel slaid atas, motor memacu roda cacing atau putaran skru melalui pemacu hos ke dalam rel slaid atas bergerak ke hadapan dan ke belakang sepanjang skru."
pelarasan lejang atas dan bawah tempat duduk
Pengangkatan tempat duduk dibahagikan kepada pengangkatan integral dan pengangkatan berasingan sebelum dan selepas serta bahagian depan pengangkatan, sebenarnya, prinsipnya adalah sama.
(1) Rod plumbum gear cacing, rod plumbum pada motor, gear motor dan gear cacing masing-masing dengan empat batang penyambung di kedua-dua hujung sambungan berputar.
Pergerakan linear gear cacing pada skru diubah menjadi pergerakan keseluruhan empat pautan, yang memacu tempat duduk untuk bergerak ke atas dan ke bawah.
(2) Pergerakan gear
Plat gigi berbentuk kipas disambungkan sebagai hujung pemacu (rasuk belakang) empat batang penyambung.
Gear pada motor memacu putaran plat gigi berbentuk kipas, untuk memacu pergerakan empat batang penyambung dan merealisasikan pengangkatan dan pengangkatan tempat duduk.
pelarasan sudut belakang dan belakang
Secara ringkasnya, Sudut pelarasan sandaran belakang dilakukan oleh plat mediator, dan menggambarkan cakera ialah dua plat gear utama engkol, gerakan berputar dipacu CAM eksentrik antara plat gigi luar, bilangan gigi pada plat gigi dan plat gear dalam. di luar satu perbezaan gigi, antara plat gear luaran, putaran plat gear membentuk sepasang gear planet berbeza gigi.
Produk Tersuai Lain





Saiz Produk